船舶工学コース 野瀬幹夫
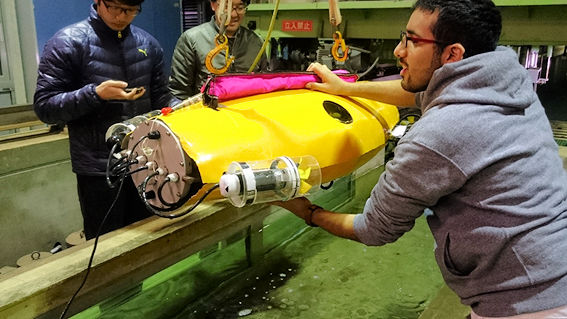
昨年度から戦略的研究予算(ブランディング分野(*))により、学内で「潮流下稼働用海中ロボット」プロジェクト結成し、修士論文1件と3件の卒業研究のテーマで研究開発を進めてきました。第一段階として先月1月12日に本学船舶海洋試験水槽で進水しました。
この研究目的と研究計画は、次の通りです。
世界でも珍しい強潮流下において海中観測や作業を行うことができる海中ロボットの研究開発を行うことにより、海洋エネルギー機器経費の3割から4割を占める設置経費や保守点検や観測調査費を大幅に軽減し、この機器の社会的受容性を向上させる事ができます。研究計画として今年度までに、水流下スラスト性能試験、カウルの設計製作、カウル有無による抵抗試験実施後、ROV各種電子機器搭載し運動制御プログラムを開発し、水槽にてROV稼働試験に成功しました。次年度は、水槽試験を行いながらこの制御プログラムの調整し、その後中間ランチャの設計製作を行う。最終年度には実海域にて潮流下で可能な観測実験を目指します。
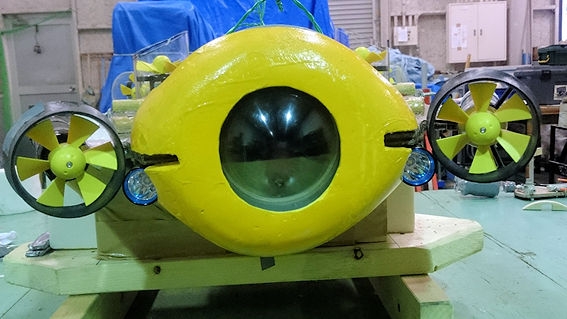
海中ロボット正面写真
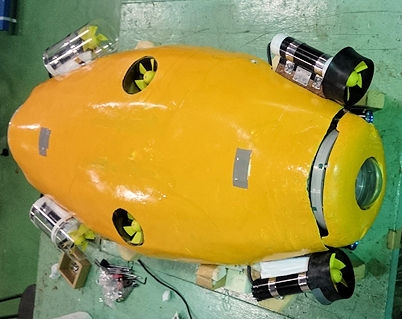
海中ロボット平面写真